- Ei Compendex
- Scopus
- DOAJ
- Chinese Science Citation Database (CSCD)
- World Journals Clout Index Report
- T1 level in Directory for Mechanical EngineeringDisciplines
| Citation: |
WANG Hui, XIANG Songming, RONG Youmin, HUANG Yu, XU Jiajun, WU Congyi. Non-teaching automatic welding system based on DXF file parsing and point cloud data processing[J]. TRANSACTIONS OF THE CHINA WELDING INSTITUTION, 2024, 45(12): 28-35. DOI: 10.12073/j.hjxb.20230729001

|
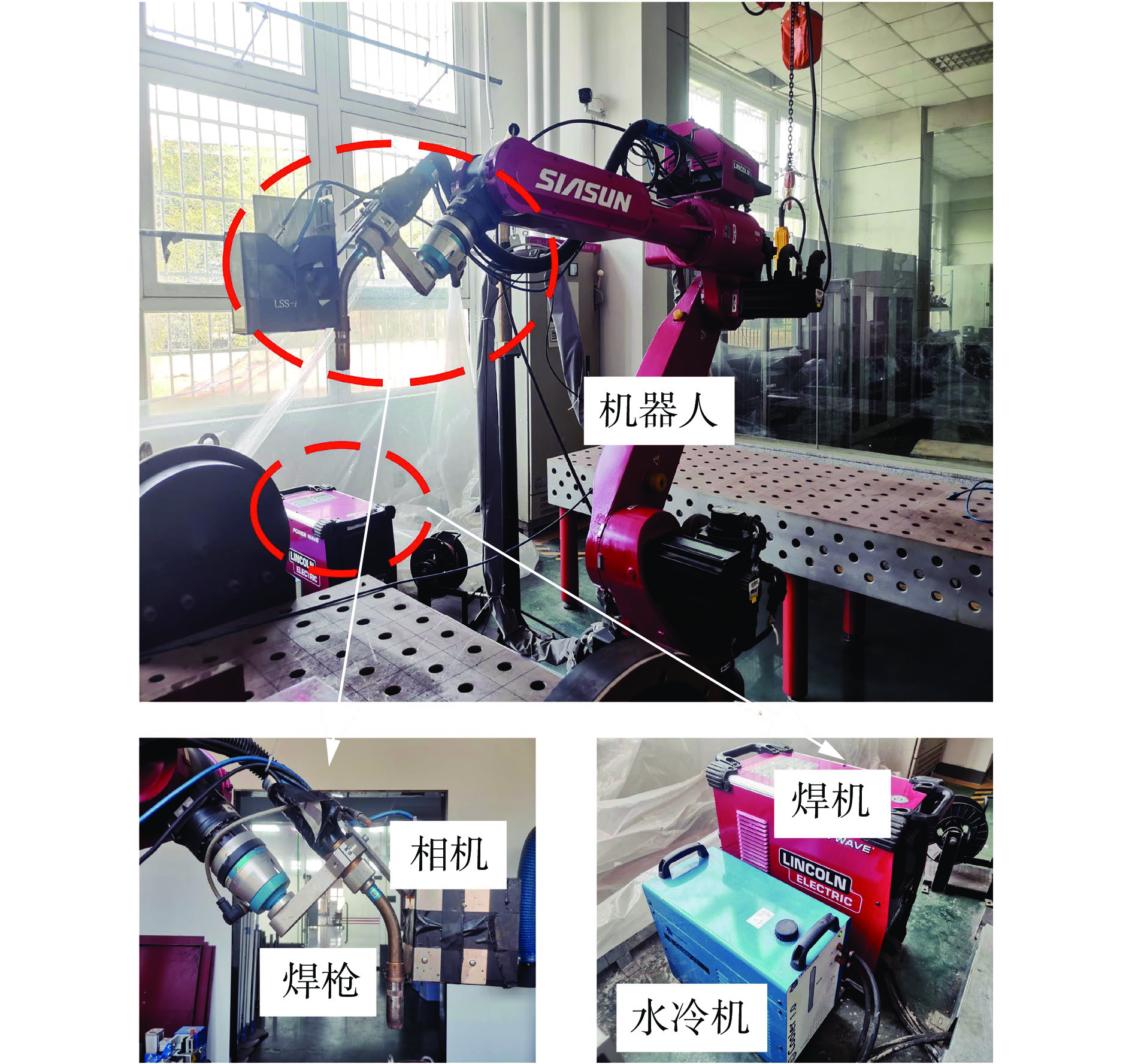
The traditional teaching welding method has a cumbersome operation process, which leads to low efficiency and high dependence on manual labor. To address these issues, this paper proposed a non-teaching automatic welding system based on DXF file parsing and point cloud data processing. The system parses the DXF file of the workpiece to obtain the ideal weld position and weld type information, and achieves the initial positioning of the robot weld by solving the multi coordinate system transformation relationship. On this basis, a laser vision sensor welding point cloud acquisition method considering real-time robot pose is proposed, and a point cloud welding seam detection algorithm based on plane detection is developed to obtain actual welding seam position information and achieve robot non-teaching welding. The results showed that the system can accurately obtain the point cloud information of the weldment, and the error of the weld seam extraction method is less than 0.16 mm, which meets the welding requirements.
| [1] |
姚宇, 张秋菊, 陈宵燕, 等. 复杂空间曲面焊接机器人自动编程系统[J]. 焊接学报, 2023, 44(5): 122 − 128. doi: 10.12073/j.hjxb.20220623003
Yao Yu, Zhang Qiuju, Chen Xiaoyan, et al. Automatic programming system of complex space trajectory welding robot[J]. Transactions of the China Welding Institution, 2023, 44(5): 122 − 128. doi: 10.12073/j.hjxb.20220623003
|
| [2] |
Zhang Y, Geng Y, Tian X, et al. Feature extraction and robot path planning method in 3D vision-guided welding for multi-blade wheel structures[J]. Optics and Lasers in Engineering, 2024, 176: 108066. doi: 10.1016/j.optlaseng.2024.108066
|
| [3] |
Zhang J, Wang Y, Xiong R. Industrial robot programming by demonstration[J]. 2016 International Conference on Advanced Robotics and Mechatronics (ICARM), Macau, China, 2016: 300 − 305.
|
| [4] |
Wang H, Chen C, Liu Y, et al. A novel approach for robotic welding trajectory recognition based on pseudo-binocular stereo vision[J]. Optics and Laser Technology, 2024, 174: 110669. doi: 10.1016/j.optlastec.2024.110669
|
| [5] |
Senicic M, Matijevic M, Nikitovic M. Teaching the methods of object detection by robot vision[C]// 2018 41st International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO). IEEE, 2018.
|
| [6] |
陈鑫. 基于激光视觉的焊缝识别与跟踪系统研究[D]. 济南: 山东大学, 2021.
Chen Xin. Research on weld seam recognition and tracking system based on laser vision[D]. Jinan: Shan Dong University, 2021.
|
| [7] |
杜鹏, 高群山. 大截面箱形钢柱机器人自动焊接施工技术[J]. 建筑施工, 2021, 43(7): 1253 − 1255.
Du Peng, Gao Qunshan. Construction technology of automatic welding of large-section box-shaped steel column robot[J]. Building Construction, 2021, 43(7): 1253 − 1255.
|
| [8] |
胡石. 基于激光扫描的工业机器人焊接焊缝跟踪方法[J]. 重庆科技学院学报(自然科学版), 2023, 25(5): 69 − 75.
Hu Shi. Weld seam tracking method for industrial robot welding based on laser scanning[J]. Journal of Chongqing University of Science and Technology (Natural Science Edition), 2023, 25(5): 69 − 75.
|
| [9] |
李秉聪, 夏卫生, 许晓群, 等. 基于点云数据驱动的中厚板机器人焊接路径规划[J]. 电焊机, 2023, 53(9): 78 − 83. doi: 10.7512/j.issn.1001-2303.2023.09.10
Li Bingcong, Xia Weisheng, Xu Xiaoqun, et al. Path planning for robot welding of medium-thick plates based on point cloud data[J]. Electric Welding Machine, 2023, 53(9): 78 − 83. doi: 10.7512/j.issn.1001-2303.2023.09.10
|
| [10] |
张园凯, 马立新, 王秀晶, 等. 基于点云的机器人钢网焊接路径规划方法[J]. 金属加工(热加工), 2021(6): 17 − 22.
Zhang Yuankai, Ma Lixin, Wang Xiujing, et al. A method of welding path planning of steel mesh based on point cloud for welding robot[J]. NW Metal Forning, 2021(6): 17 − 22.
|
| [11] |
Wang Y, Li X, Zhang Y. An automation solution to convert CAD engineering drawings into railroad station models[J]. Computer-aided Civil and Infrastructure Engineering, 2024, 39: 679 − 691. doi: 10.1111/mice.13091
|
| [12] |
余凌波. 基于线结构光的单目3D视觉机器人制鞋喷胶技术研究[D]. 武汉: 华中科技大学, 2019.
Yu Lingbo. Research on robot shoe gluing technology of monocular 3D vision based on line structure light[D]. Wuhan: Huazhong University of Science and Technology, 2019.
|
| [13] |
Zong W, Li M, Li G, et al. Toward efficient and complete line segment extraction for large-scale point clouds via plane segmentation and projection[J]. IEEE Sensors Journal, 2023, 23: 7217 − 7232
|
| [14] |
Zhong Y, Zhao D, Cheng D, et al. A fast and precise plane segmentation framework for indoor point clouds[J]. Remote Sensing, 2022, 14: 15.
|
| [15] |
Martin A Fischler, Robert C Bolles. Random sample consensus[J]. Communications of the ACM, 1981, 24(6): 381 − 395.
|
| [16] |
Wu Q, Liu J, Gao C, et al. Improved RANSAC point cloud spherical target detection and parameter estimation method based on principal curvature constraint[J]. Sensors, 2022, 22(15): 5850.
|
| [1] | HU Jiacheng, YU Shuangfei, ZHANG Tao, GUAN Yisheng, ZHU Haifei. Determination of welding torch space pose based on local point cloud of weld path points[J]. TRANSACTIONS OF THE CHINA WELDING INSTITUTION, 2024, 45(4): 86-92. DOI: 10.12073/j.hjxb.20230406002 |
| [2] | SUN Lei, ZHANG Yi, CHEN Minghe, ZHANG Liang, MIAO Naiming. Finite element analysis of solder joint reliability of 3D packaging chip[J]. TRANSACTIONS OF THE CHINA WELDING INSTITUTION, 2021, 42(1): 49-53. DOI: 10.12073/j.hjxb.20201021002 |
| [3] | HAN Lishuai, HUANG Chunyue, LIANG Ying, KUANG Bing, HUANG Genxin. Analysis of stress strain and shape size optimization of 3D micro-scale CSP solder joints in random vibration[J]. TRANSACTIONS OF THE CHINA WELDING INSTITUTION, 2019, 40(6): 64-70. DOI: 10.12073/j.hjxb.2019400156 |
| [4] | XIONG Guoji, HUANG Chunyue, LIANG Ying, LI Tianming, TANG Wenliang, HUANG Wei. Optimization design of 3D-TSV interconnect structure under random vibration load based on orthogonal experiment and gray relational analysis[J]. TRANSACTIONS OF THE CHINA WELDING INSTITUTION, 2016, 37(7): 22-26. |
| [5] | CHEN Haiyong, DU Xiaolin, DONG Yan. Tiny visual feature extraction of random changing weld[J]. TRANSACTIONS OF THE CHINA WELDING INSTITUTION, 2016, 37(5): 97-101. |
| [6] | HUANG Chunyue, XIONG Guoji, LIANG Ying, SHAO Liangbin, HUANG Wei, LI Tianming. Study on stress distribution of 3D-TSV interconnect structure under random vibration load[J]. TRANSACTIONS OF THE CHINA WELDING INSTITUTION, 2015, 36(11): 17-20. |
| [7] | ZHANG Yu, LUO Zhen, TAN Hui, DUAN Rui, ZHANG Chengda. Hybrid 3D processing technology based on build-up welding and electrolytic machining[J]. TRANSACTIONS OF THE CHINA WELDING INSTITUTION, 2015, 36(8): 39-42. |
| [8] | QI Xiubin. State-of-arts of visual sensing technology to monitor laser welding process[J]. TRANSACTIONS OF THE CHINA WELDING INSTITUTION, 2008, (2): 108-112. |
| [9] | YU Xinghua, LIANG Zhimin, GAO Hongming, ZHANG Guangjun. Sparse point clouds fitting in 3D reconstruction for welding environment[J]. TRANSACTIONS OF THE CHINA WELDING INSTITUTION, 2007, (6): 109-112. |
| [10] | Li Heqi, Kenji Oshima. STUDY OF SAMPLING AND CONTROLLING MAG WELDING ARC LENGTH BY TV CAMERA[J]. TRANSACTIONS OF THE CHINA WELDING INSTITUTION, 1989, (4): 258-264. |
Supported by:
Beijing Renhe Information Technology Co. Ltd

 DownLoad:
DownLoad: