
Laser scanning welding of 2060 Al-Li alloy with filler wire
-
摘要: 针对铝锂合金焊后易产生气孔、抗拉强度低的缺点,提出“∞”形激光扫描填丝焊接工艺方法,以2 mm厚2060铝锂合金为研究对象开展对接焊接试验研究,探究激光扫描填丝焊接方法对铝锂合金焊接缺陷抑制作用. 借助高速相机摄像系统,探究了激光扫描填丝焊接工艺下熔池的动态演变过程,同时探究了扫描参数对焊缝气孔的影响规律及扫描填丝工艺对气孔的抑制机理. 采用曲面响应统计方法探究工艺参数对抗拉强度的影响,并给出工艺参数组合与抗拉强度的定量关系及最优参数组合,焊接接头最大抗拉强度可达382 MPa,为母材的76.4%. 结果表明,“∞”形激光扫描填丝焊接工艺下熔池流动平稳,小孔喷发强度较弱且呈现出周期性;“∞”形激光扫描填丝焊接工艺可以有效抑制焊缝气孔,提高铝锂合金焊接质量.Abstract: In order to solve the problems of porosity and insufficient tensile strength of aluminum lithium alloy weld, a method of laser scanning welding with filler wire was proposed. Taking 2060 Al-Li alloy with 2 mm thickness as research objects, the suppression effect of laser scanning welding with filler wire on welding defects of Al-Li alloy was investigated. A high-speed camera system was built to explore the mechanism and the change of the dynamic evolution of the molten pool. The influence of scanning parameters on the formation of porosity in weld seam and the mechanism of inhibiting porosity of laser scanning welding with filler wire technique were investigated. Response surface methodology was applied to explore the influence of process parameters on tensile strength. The quantitative relationship between process parameter combination, tensile strength and the optimal parameter combination were proposed. The maximum tensile strength of the weld is 382 MPa, which is 76.4% of the base metal. The research shows that the flow of the molten pool is stable, and meanwhile the eruption of the keyhole is weak and showing the periodicity, in the process of “∞” shaped laser scanning welding with filler wire. And the process of “∞” shaped laser scanning welding with filler wire can effectively inhibit weld porosity and improve the welding quality of Al-Li alloy.
-
0. 序言
焊接技术[1-2]作为一种连接方式,因其精确、可靠、成本低等特性,在现代工业中发展迅速,发挥着不可替代的作用. 焊接过程中,焊缝金属从高温液态快速冷却至常温固态导致组织不均匀问题,同时由于坡口油污、焊材混入、焊接环境条件不稳定等因素造成各式各样的焊接缺陷,使得焊缝区域成为工业产品的薄弱环节. 随着焊接技术的进步以及各种无损检测技术[3-5]的出现和发展,工业产品质量得到大幅提高. 其中射线检测技术(radiographic testing,RT)以其设备简便、结果直观、数据易存储等优点被工程人员所接受,得到了长期、广泛的应用. 然而RT底片缺陷的判读存在主观性强、工作强度大、劳动重复性高、效率低[6-8]等特点. 为使RT底片缺陷检测高效、规范和智能[9-11],寻求一种缺陷自动识别的方法显得必要且迫切.
近年来,随着人工智能的飞速发展,人们利用深度学习技术在图像特征学习上的优势[12],为RT底片自动识别的研究打开了新思路. 研究人员为实现缺陷检测的标准化和智能化,提出了多种基于计算机焊缝图像的识别方法[13]. 有别于传统方法直接对底片缺陷特征进行显式描述和提取的思想,卷积神经网络(convolutional neural network,CNN)直接从数据样本中学习特征,具有“端到端”的特点,输入为缺陷图像,输出为缺陷的分类结果[14],其中残差网络(residual network,ResNet)就是典型的CNN网络. HOU等人 [15]设计了一个对整张RT底片图像进行焊缝自动检测的深度神经网络模型,试验证明可有效识别缺陷;樊丁等人[16]通过在CNN模型中改进激活函数以及采用超像素分割算法对图像进行像素块处理,对RT底片图像进行4分类,试验证明可缩短网络训练耗时,并且提高识别准确率;PALMA-RAMÍREZ等人[17] 提出了一种基于ResNet50的新的CNN模型,利用分层交叉验证、数据增强和正则化用于提高泛化和避免过度拟合,对射线图像中的4种焊接缺陷(裂纹、孔隙、未焊透和无缺陷)进行分类,取得了不错的效果;SAY等人[18]对RT底片缺陷数据集进行随机旋转、剪切、缩放、亮度调整和水平旋转等增广操作,通过优化算法构建CNN模型,在RT底片6分类任务中有优于同类产品的表现. 然而,现场缺陷类型繁多,以上研究大多局限于较少缺陷类型,不能完全适应缺陷检测工作实际情况;此外,基于CNN的多分类问题模型,本质上是高阶非线性多分类器,为提升多分类问题自动识别精度,提升传统CNN模型的非线性是模型设计的关键.
目前,射线检测底片中的缺陷种类繁多,现有的基于CNN的多分类模型在处理复杂、多类别缺陷时存在一定的局限性. 针对这一问题,结合神经记忆常微分方程(neural memory Ordinary Differential Equation, nmODE)模块高度非线性的优势,提出了一种基于ResNet的RT分类模型nmODE-ResNet,以提升人工智能模型在多分类任务中的表现. 通过对7类常见焊接缺陷(裂纹、未熔合、未焊透、内凹、咬边、夹渣和气孔)试验验证,nmODE-ResNet在识别精度和泛化能力优于现有的CNN模型.
1. 基于神经网络的图像分类方法
1.1 RseNet结构
在分类任务中,较深的卷积神经网络非线性更强,通常能够表现出更好的分类性能. 然而,深层CNN在训练过程中容易出现梯度消失的问题,使得训练变得困难.
为了解决这一问题,HE等人[19]提出了残差网络,其通过引入残差连接,在增加网络深度的同时,缓解训练难度. 在ImageNet数据集上,残差网络实现了3.57%的错误率,并在2015年的大规模视觉识别分类任务竞赛中获得了优胜.
残差网络的优势在于其易于优化,并且能够通过增加更多的卷积层来进一步提高精度. 与其他网络结构相比,残差网络的主要区别在于其使用了残差块(residual block),如图1所示. 残差块通过快捷连接(skip connection)在输入和输出之间直接传递信息.
通过使下一层的输入X近似等于输出H(x),跳跃连接可以保证网络在后续学习中不降低准确率. 当偏差增大时,学习目标发生变化,残差网络不再学习完整输出,而是学习输出 H(x) 和输入 x 之间的差值,即残差F(x) = H(x) – x. 这种结构使得网络可以专注于学习更细微的特征变化,同时保持整体网络的稳定性和准确性. 通过引入跳跃连接,残差块能够直接将前一层的输出传递给后面的层,为梯度提供更短的路径,使得梯度能够直接流向较浅的层,从而避免了梯度在深层传播过程中消失或衰减的问题;又因为跳跃连接允许信息在不同层之间直接传递,信息在短路径上传播时不会迅速增大,所以可以避免深层网络中的梯度爆炸问题[19]. 这一机制不仅使得深层网络的训练变得更加稳定和高效,还允许模型在增加网络深度的同时保持或提升分类性能.
1.2 nmODE原理及结构
近年来,越来越多的研究开始采用动力系统的视角来分析神经网络[20-21]. 这种创新方法将神经网络层与时间演化相结合,通过微分方程的框架进行研究,带来了新的见解和视角. 在这些研究中,新提出且独特的是nmODE[22-23] .
与传统的将输入视为初始状态的神经ODE范式不同,nmODE采用了一种不同的策略,即将输入作为附加信息注入模型. 这种独特的方法显著增强了其非线性表达的潜力,提高了其建模能力. nmODE能够在更长的时间跨度上捕捉复杂的动态变化,不仅提高了模型的表达能力,还使得网络在处理时间序列数据和其他复杂任务时表现出更高的灵活性和准确性. 这一视角的引入,展示了动力系统与神经网络结合的潜力,为深入理解和优化神经网络提供了新的方向.
在神经网络中,nmODE模块的结构如图2所示. 该模块基于的常微分方程为
$$ \dfrac{{{\mathrm{d}}y}}{{{\mathrm{d}}t}} = - y + {\sin ^2}(y + F(x))_{}^{} $$ (1) 式(1)及图2中,x表示该组件的外部输入,由ResNet提取的特征提供,而y(0)则表示系统的初始状态. 方程的右侧由线性项-y和非线性项$ {\sin}^{2}(y + F(x\left)\right) $组成,线性项对应状态的衰减,非线性项则引出了复杂的动态行为,能够捕捉更高阶的特征和非线性关系. 该模块的最终输出值对应于时间T时的状态,即y(T),其中,T设置为1. 为了计算这一状态,利用四阶龙格-库塔法,给定曲线上一个点的值与梯度值,就可以估计曲线上任何其他点的值. 这一数值积分技术是该组件运行的核心原理,通过逐步逼近真实解,确保了模型的稳定性和精确性. 结合外部输入和初始状态,nmODE可以模拟长时间动态变化的特征,允许网络灵活处理多尺度特征,提高了模型在时间序列数据等复杂任务中的适应性. 在分类任务中,nmODE模块结合外部输入和初始状态,通过动态更新提取出更具判别力的特征,从而提升分类精度.
1.3 基于nmODE-ResNet的缺陷智能分类流程
为进一步提高残差网络在缺陷识别任务的性能,利用nmODE非线性映射能力强的优势,提出了一种基于nmODE-ResNet的缺陷分类流程,如图3所示.
基于nmODE-ResNet的缺陷智能分类流程具体步骤如下:首先,将焊缝RT缺陷数据集图像进行常规的图像预处理,将所有图像的尺寸调整为128 × 128像素,并对RGB三通道进行归一化处理;然后随机对图像进行水平和竖直方向的翻转操作,实现数据集增广;预处理后的数据集用于训练和验证不同深度的ResNet模型(包括18层、34层、50层和101层),通过比较各模型的性能,选出表现最佳的模型结构作为主干网络. 最后,在主干网络中加入nmODE模块,nmODE基于常微分方程,对于连续函数有很好的逼近能力[24],进一步增强模型的建模性能.
2. nmODE-ResNet模型构建
2.1 nmODE-ResNet模型
采用ResNet作为模型主干,提出的nmODE-ResNet缺陷分类模型结构如图4所示,该模型结构仅显示了nmODE-ResNet网络结构中的卷积层、池化层、全连接层和跳转连接,未绘制批处理归一化层和ReLU激活层.
模型首先对输入图像进行卷积和池化操作,使用3 × 3卷积核对提取的特征进行处理,通道数为64;对尺寸为64 × 32 × 32的特征图进行步长为2的卷积运算以实现下采样,并进行数据归一化处理,得到尺寸为128 × 16 × 16的特征图;对该特征图进行步长为1的卷积运算和数据规范化;特征图经过两次步长为2的3 × 3卷积运算进行进一步下采样,得到尺寸为512 × 4 × 4的特征图. 此特征图送入一系列3 × 3卷积层进行深层次的特征提取,最终进入全局平均池化层. 在全局平均池化层之后,512个通道的特征图进入nmODE模块,进行非线性重映射. nmODE模块利用式(1)的微分方程进行映射,在 T = 1时得到输出状态 y(1),这个过程增强了模型的非线性表示能力. 经过nmODE模块处理后的特征图,最终进入全连接层,全连接层对提取的特征进行准确分类,从而完成RT底片缺陷分类任务.
模型的设计通过引入在处理复杂和非线性特征方面具有卓越能力的nmODE模块,提高了分类性能. 试验结果表明,nmODE-ResNet在缺陷分类任务中,相较于基础的ResNet模型,具有更高的准确率和鲁棒性.
2.2 数据集准备
搜集整理承压设备制造厂以及管道安装现场含缺陷X射线底片图像,并裁剪、截取的缺陷图片;由成都市特种设备检验检测研究院3名具有国家市场监督管理总局颁发的射线检测高级(III)证书,且具有10年以上现场缺陷评判经验的检验检测人员对其中的缺陷进行评定,并投票决定缺陷类型;随后该数据集将缺陷分为裂纹、未熔合、未焊透、内凹、咬边、夹渣和气孔7类,共包含
1899 张图片,其中裂纹图像320张、未熔合190张、未焊透317张、内凹204 张、咬边221张、夹渣269张、气孔378张,部分缺陷图像如图5所示. 根据标准,每张射线底片需有由识别标记和定位标记组成的唯一性标记,这些标记在拍摄底片时一般由铅制数字、拼音字母和符号构成;另外还可能有表征底片灵敏度的像质计,大多像质计由不同粗细的金属丝组成,它们在底片上分别会呈现相应的亮色字符和亮色的线段. 数据集缺陷图像中,少数标记字符离缺陷较近或像质计处有缺陷显示,在裁剪过程中将这些显示保留下来. 试验中数据集每类缺陷样本按照比例7∶1∶2划分为训练集、验证集和测试集.2.3 分类试验结果与分析
试验搭载于Ubuntu 22.04.2操作系统、Intel Xeon Gold 5318Y CPU @ 3.30 GHz处理器和NVIDIA GeForce RTX 4090显卡,在PyTorch框架下完成算法代码编写. 模型训练采用Adam优化器、学习率$ \lambda $ =
0.0001 、批量大小batch_size = 4、迭代次数epoch = 250. 训练缺陷分类模型时,七类交叉熵损失函数[25]为$$ L = - \frac{1}{N}\sum\limits_{i = 1}^N {\sum\limits_{j = 1}^M {\mathop y\nolimits_{ij} \log } } \mathop {\hat y}\nolimits_{ij} $$ (2) 式中:i表示第i个样本;j表示第j类缺陷;N为样本总数,N =
1329 ;M为缺陷分类总数,M = 7;yij表示第i个样本为第j类缺陷的真实概率,yij为0或者1;$ \mathop {\hat y}\nolimits_{ij} $表示第i个样本为第j类缺陷的预测概率,为网络输出值.为表征4种ResNet模型在测试集上的分类性能,引入准确率(Acc)和召回率(R)指标,即
$$ A_{\mathrm{cc}} = \frac{{TP + TN}}{{TP + TN + FP + FN}} $$ (3) $$ R = \frac{{TP}}{{TP + FN}} $$ (4) 式中:TP(true positive)表示实际为正样本,预测为正样本;TN(true negative)表示实际为负样本,预测为负样本;FN(false negative)表示实际为正样本,预测为负样本;FP(false positive)表示实际为负样本,预测为正样本.
4种ResNet模型缺陷7分类任务分类结果如表1所示. 由表1分析可知,对于焊缝缺陷分类任务,模型深度与分类准确性不完全正相关. ResNet101和ResNet50分类准确率均低于ResNet34. 这是因为更多的层数和参数量导致模型在训练过程中发生过拟合,使得模型过于贴近训练集的分布,从而缺乏鲁棒性和泛化能力. ResNet34在该任务中表现最佳,准确率优于其他模型,因此选择ResNet34作为模型主干.
表 1 4种ResNet模型缺陷7分类任务分类结果Table 1. Classification results of 7-classification task using four types of residual networks模型 准确率Acc(%) 召回率R(%) 数据集缺陷 裂纹 未熔合 未焊透 内凹 咬边 夹渣 气孔 ResNet18 68.65 82.81 21.05 76.92 30.95 77.78 74.55 84.42 ResNet34 74.09 89.06 39.47 70.77 45.24 88.89 72.73 89.61 ResNet50 72.28 79.69 42.11 69.23 47.62 75.56 72.73 94.81 ResNet101 73.58 82.81 34.21 81.54 47.62 75.56 83.64 84.42 对于有无nmODE模块进行消融试验,研究进一步引入定量指标精确率(P)和F1系数(F1)进行评价,即
$$ P = \frac{{TP}}{{TP + FP}} $$ (5) $$ F1 = \frac{{2 \times P \times R}}{{P + R}} $$ (6) 在消融试验中,ResNet34与提出的nmODE-ResNet损失函数L以及准确率(Acc)在训练过程中的收敛情况如图6所示. 训练过程中,ResNet34的训练损失(train loss)下降速度较快,并且在早期阶段展现出更快速的收敛特性. 经过多轮训练后,两者的最终训练损失函数值几乎无差距,表明nmODE-ResNet在一定程度上保持了与ResNet34相似的学习能力. nmODE-ResNet的验证集准确率(validation accuracy)展现出更快的上升趋势,表明其在面对数据变化时具有更强的鲁棒性. 这一现象可能归因于nmODE模块中引入的动态记忆机制,使模型能够更有效地捕捉和利用长时依赖信息,从而提升了模型对新数据的适应能力. 最后nmODE-ResNet在验证集上的准确率高于ResNet34,进一步验证了该模型在处理缺陷分类任务时的优势.
![]() 图 6 训练过程中参数对比Figure 6. Comparison of parameters during training. (a) loss function; (b) accuracy
图 6 训练过程中参数对比Figure 6. Comparison of parameters during training. (a) loss function; (b) accuracy消融试验结果见表2所示. 表2中对比了ResNet34提出的nmODE-ResNet在分类性能上的结果. 由表可知,在加入nmODE模块后,通过对ResNet34提取的512 × 4 × 4特征图进行重新映射,模型分类准确率提升1.56%,这体现了nmODE模块非线性建模能力的增强. 在危害性缺陷识别表现上, nmODE-ResNet保持了对裂纹的召回率,未熔合的召回率提升18.42%,未焊透的召回率提升6.15%.
表 2 引入nmODE模块前后缺陷7分类任务结果Table 2. Classification results of 7-classification task before and after introducing the nmODE module模型 指标 所有类别(%) 裂纹(%) 未熔合(%) 未焊透(%) 内凹(%) 咬边(%) 夹渣(%) 气孔(%) ResNet34 Acc/R 74.09 89.06 39.47 70.77 45.24 88.89 72.73 89.61 P 71.13 82.61 53.57 79.31 61.29 62.50 75.47 83.13 F1 70.25 85.71 45.45 74.80 52.05 73.39 74.07 86.25 nmODE-ResNet Acc/R 75.65 89.06 57.89 76.92 57.14 75.56 69.09 87.01 P 73.38 82.61 53.66 83.33 68.57 69.39 69.09 87.01 F1 73.17 85.71 55.70 80.00 62.34 72.34 69.09 87.01 相对于ResNet34,nmODE-ResNet在精度(P)和F1得分、危害性缺陷识别,对裂纹保持了性能稳定性,未熔合在F1上提高10.25%,未焊透在P和F1上提高分别为4.02%和5.20%.
由于nmODE模块更优越的抗噪能力[21,26],模型nmODE-ResNet相比ResNet34更能集中关注于缺陷图中的缺陷位置. 图7展示了部分缺陷的图像、ResNet34和nmODE-ResNet的梯度加权类激活映射(gradient-weighted class activation mapping, Grad-CAM)[27]. Grad-CAM通过热力图的形式可视化神经网络对特定类别的关注区域,从而直观地反映模型的性能.
![]() 图 7 缺陷图像及相应 Grad-CAMFigure 7. Defect images and corresponding Grad-CAM. (a) defect images; (b) Grad-CAM of ResNet34; (c) Grad-CAM of nmODE-ResNet
图 7 缺陷图像及相应 Grad-CAMFigure 7. Defect images and corresponding Grad-CAM. (a) defect images; (b) Grad-CAM of ResNet34; (c) Grad-CAM of nmODE-ResNetnmODE-ResNet总参数量21.3 M,与ResNet34一致,是一个轻量化的模型,可轻松部署在任意计算机中进行分类任务. 在不增加模型复杂度、内存成本和需求情况下,提高了模型的性能.
2.4 人工对比试验结果与分析
为进一步评价nmODE-ResNet缺陷识别的性能,由成都市特种设备检验检测研究院另外3名具有国家市场监督管理总局颁发的射线检测中级(II)及以上证书和特种设备检验师证书的检验人员,对测试集中RT底片图像进行缺陷分类试验,分类过程按照检验工作规范进行,并记录各检验师缺陷评定总时间. 对RT图像焊接缺陷7分类任务,nmODE-ResNet、3名检验师的准确率及用时如表3所示,相应评判结果的混淆矩阵如图8所示.
表 3 nmODE-ResNet和3名检验师的分类对比试验Table 3. Classification accuracy and time consumption of nmODE-ResNet and three tnspectors准确率Acc(%) 用时t/min nmODE-ResNet 75.65 <0.13 检验师1 77.89 ≈109 检验师2 71.85 ≈114 检验师3 67.37 ≈96 ![]() 图 8 nmODE-ResNet 和 3 名检验师评判结果混淆矩阵Figure 8. Confusion matrix of the results by nmODE-ResNet and three inspectors. (a) nmODE-ResNet; (b) inspector 1; (c) inspector 2; (d) inspector 3
图 8 nmODE-ResNet 和 3 名检验师评判结果混淆矩阵Figure 8. Confusion matrix of the results by nmODE-ResNet and three inspectors. (a) nmODE-ResNet; (b) inspector 1; (c) inspector 2; (d) inspector 3表3显示,与3名检验师比,nmODE-ResNet在焊接缺陷7分类任务中的分类准确性排名第二,优于检验师人均水平,用时仅0.13 min,远低于检验师的平均用时,试验表明,nmODE-ResNet RT缺陷分类系统能够在保证准确率基础上显著提高工作效率. 由图8可见,对于夹渣类缺陷,nmODE-ResNet准确性(69.09%)低于检验师(85.71%,71.43%,85.71%),原因可能在于检验师具有丰富的背景知识,例如夹渣可能产生出现的部位、边缘弧度和黑度分布等;对于裂纹和气孔类特征典型的缺陷,nmODE-ResNet准确率分别为89.06%和87.01%,接近或略低于检验师准确率(87.50%,94.74%,93.75%,94.74%,93.75%和94.74%),但其准确率在实际检验工作中可接受.
从混淆矩阵中还可以看出,检验师分类准确率在不同种类缺陷中分布不同,个别检验师在裂纹、气孔、夹渣等类别上表现较好,但整体准确率较nmODE-ResNet略低;同时表明人工评判中的主观性和一致性有待提高,特别在未熔合、未焊透和咬边这类位于焊缝根部、有较高相似性的缺陷进行评判时,检验师评判容易发生类别混淆,而nmODE-ResNet则表现较好,一致性更高.
3. 结论
(1) 提出nmODE-ResNet模型通过在ResNet34基础上引入nmODE模块,模型分类准确率提升1.56%. 结果表明,nmODE模块的非线性建模能力在不增加复杂度的前提下,增强了模型在缺陷图像7分类任务上的表现.
(2) 试验结果数据显示,深度人工神经网络模型的深度与RT缺陷多分类精度并非正相关. 与ResNet50和ResNet101相比,ResNet34表现出了更高的准确率和更好的鲁棒性.
(3) 在数据集准备方面,通过对含缺陷焊缝X射线底片图像进行剪切,保证了模型训练数据集的多样性和代表性. 数据集每个缺陷类别样本数量均按7∶1∶2的比例划分为训练集、验证集和测试集,确保了试验结果的可靠性.
(4)通过nmODE-ResNet与人工缺陷分类试验的结果对比表明,nmODE-ResNet准确率达到检验师平均水平,而耗时仅为数秒,有效提高RT缺陷分类效率;同时提高了不同缺陷分类一致性,在易混淆缺陷分类任务上表现更好.
-
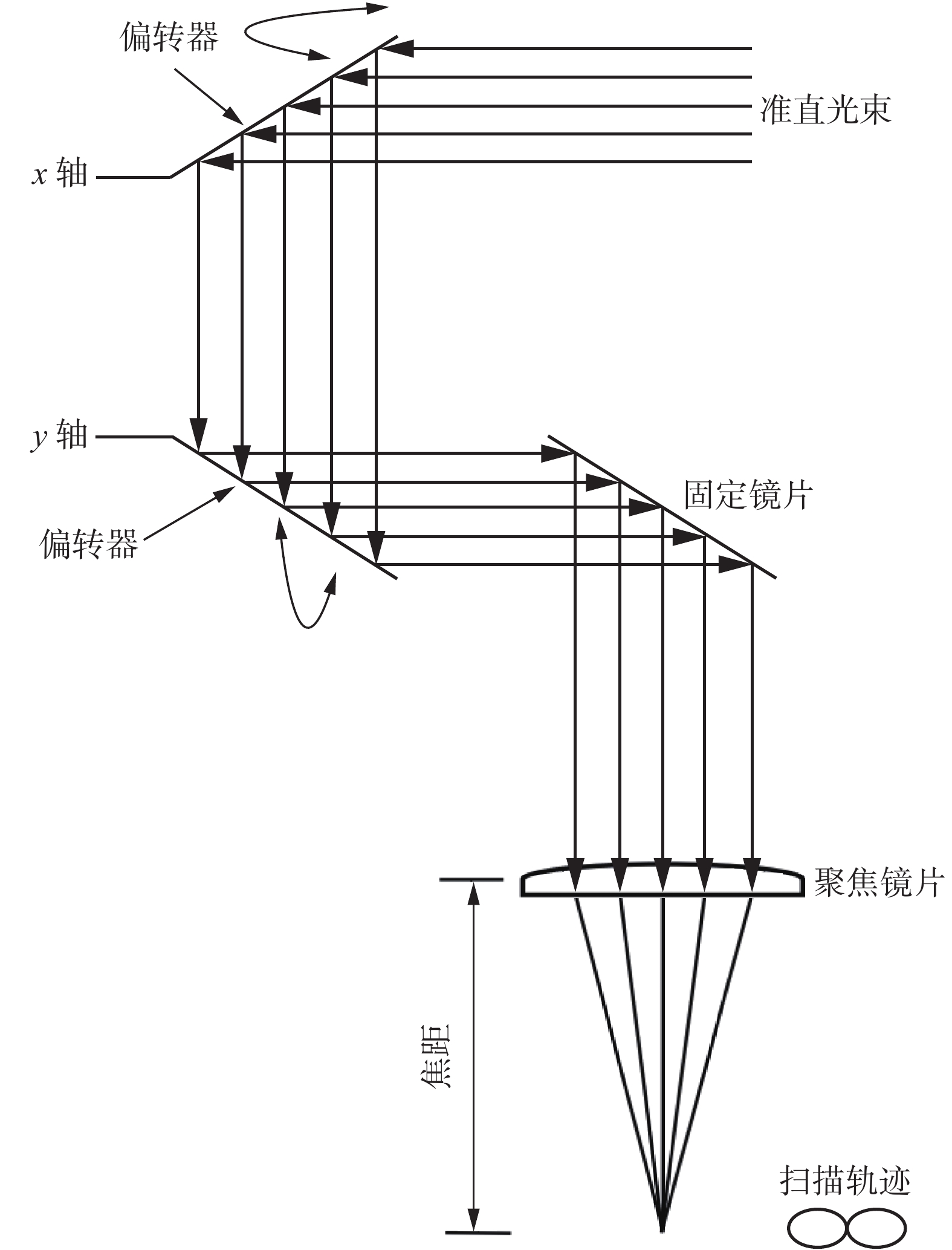
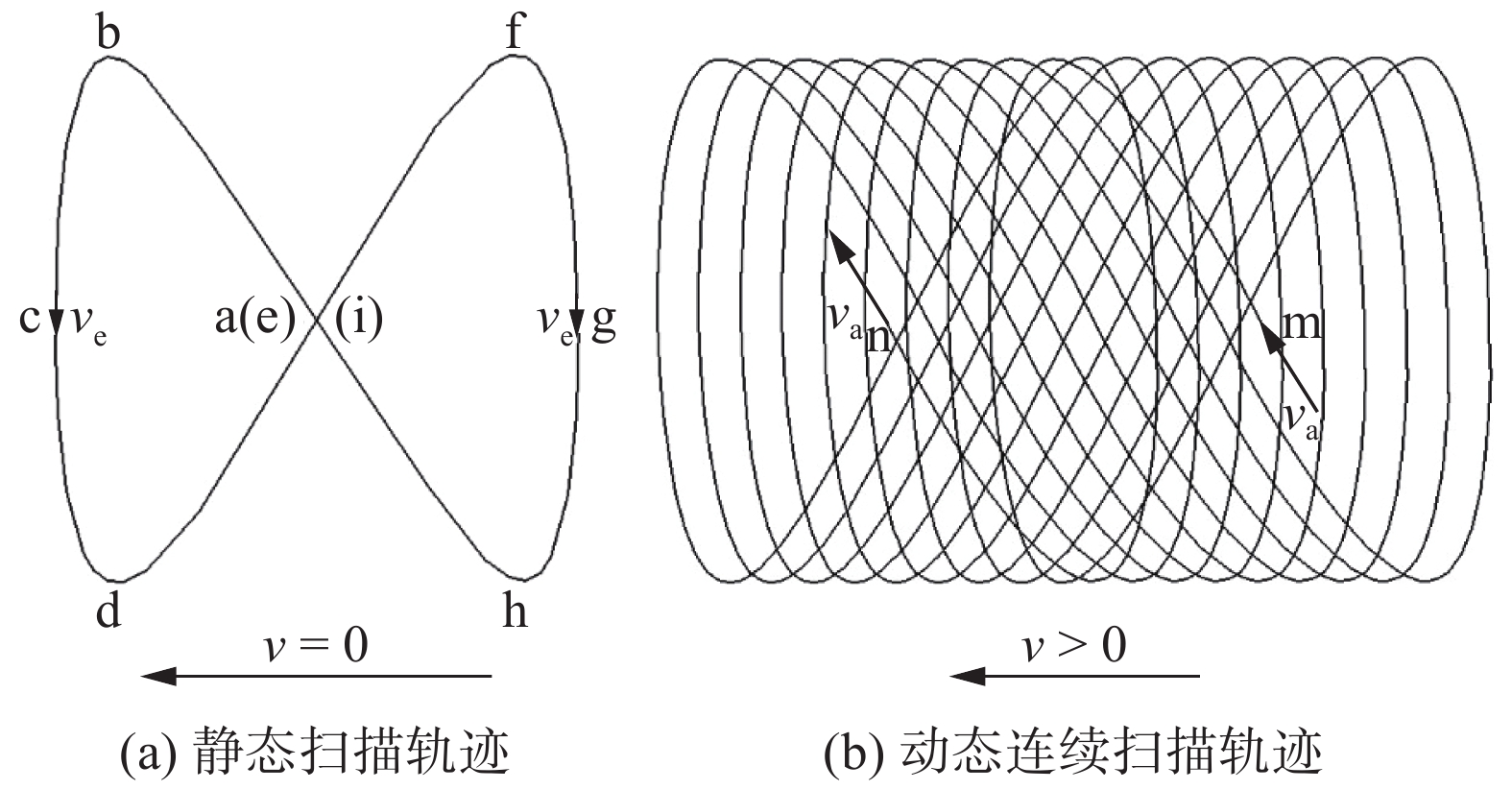
![]()
图 3 “∞”形激光束扫描运动轨迹
Figure 3. Motion trajectories of “∞” shaped laser scanning welding. (a) static scanning trajectory;(b) dynamic continuous scanning trajectory
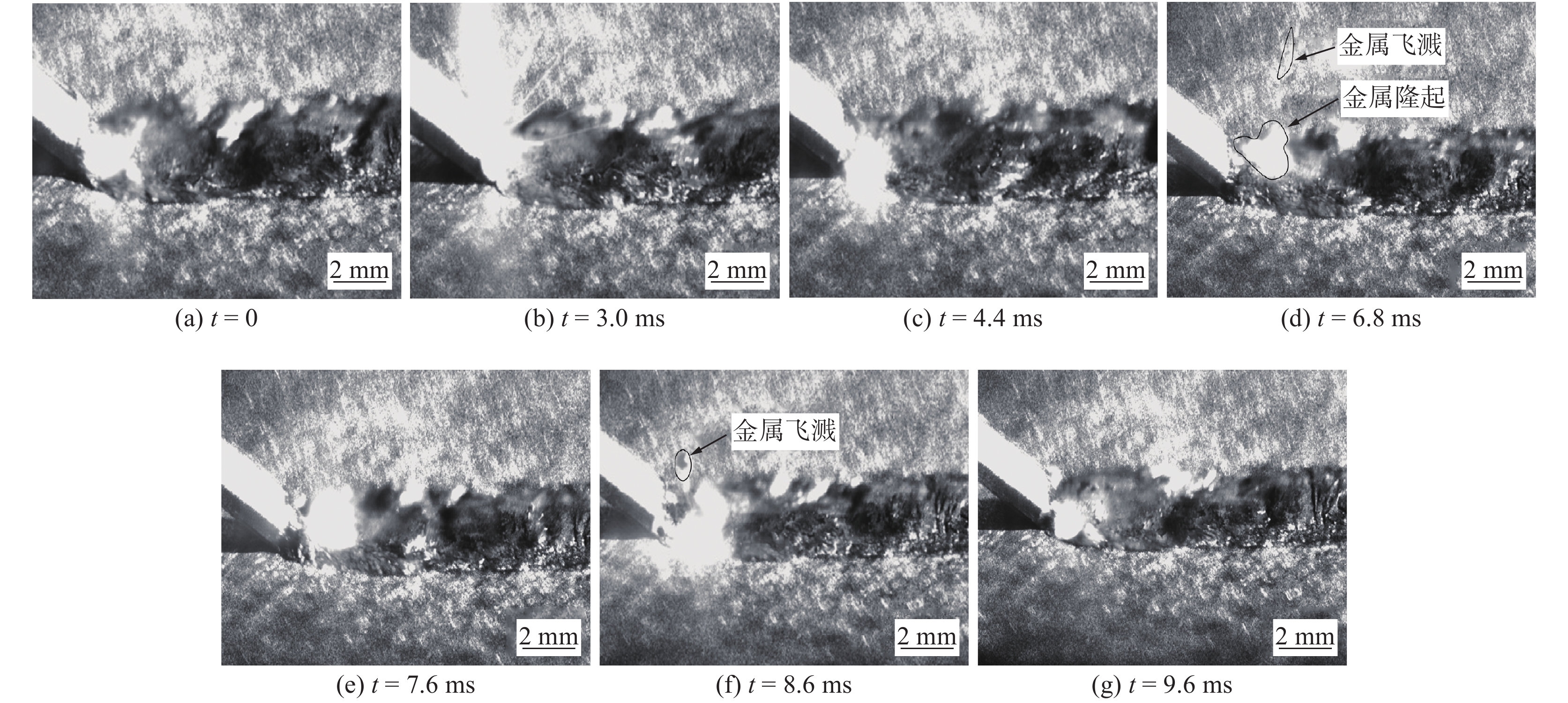
![]()
图 4 “∞”形激光扫描填丝焊接熔池动态演变图
Figure 4. Dynamic evolution of welding pool of “∞” shaped laser scanning welding with filler wire. (a) t = 0; (b) t = 3.0 ms; (c) t = 4.4 ms; (d) t = 6.8 ms; (e) t = 7.6 ms; (f) t = 8.6 ms; (g) t = 9.6 ms
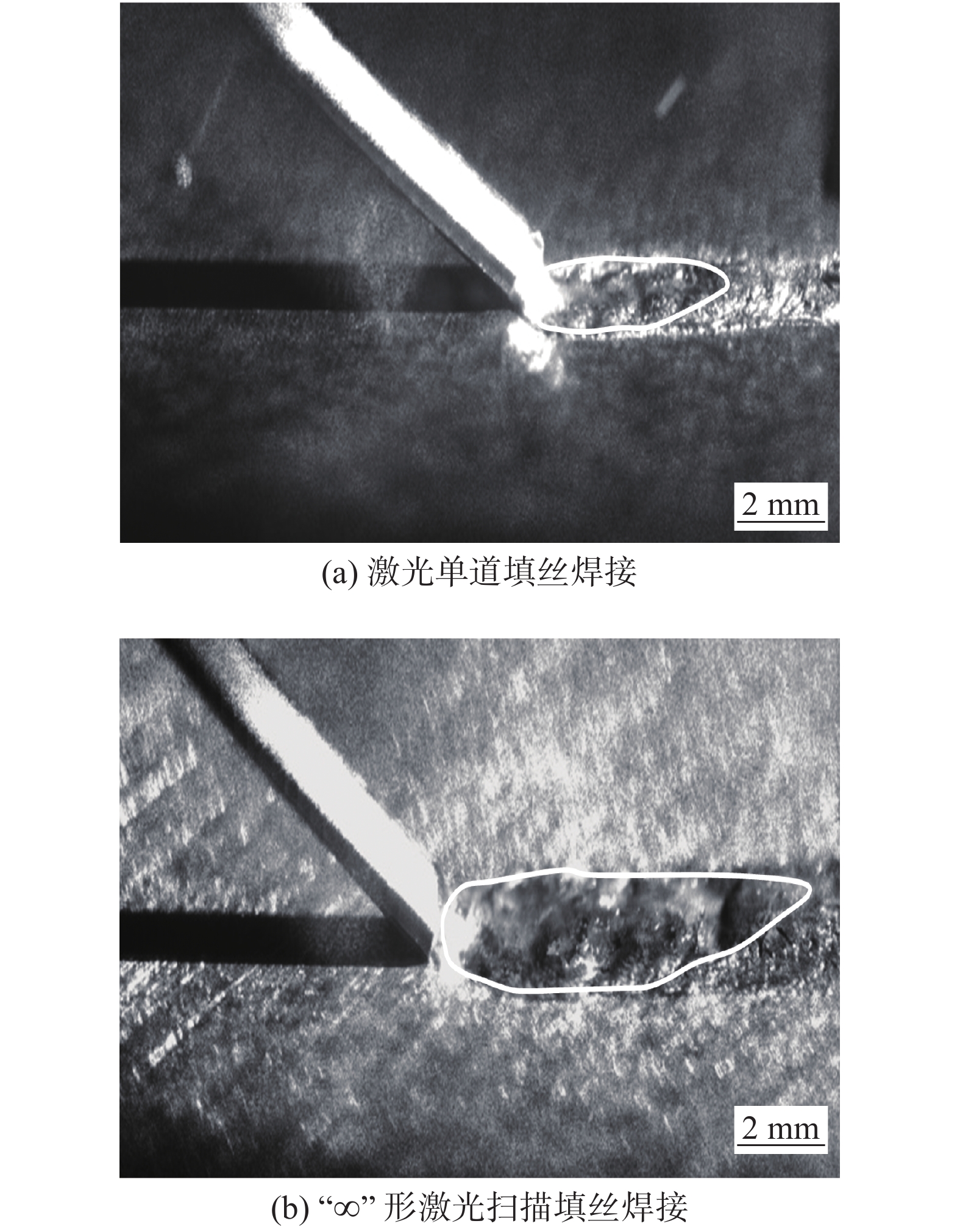
![]()
图 5 不同焊接工艺熔池静态形貌
Figure 5. Morphology of welding pool of different laser welding process. (a) single pass laser welding with filler wire; (b) “∞” shaped laser scanning welding with filler wire
![]()
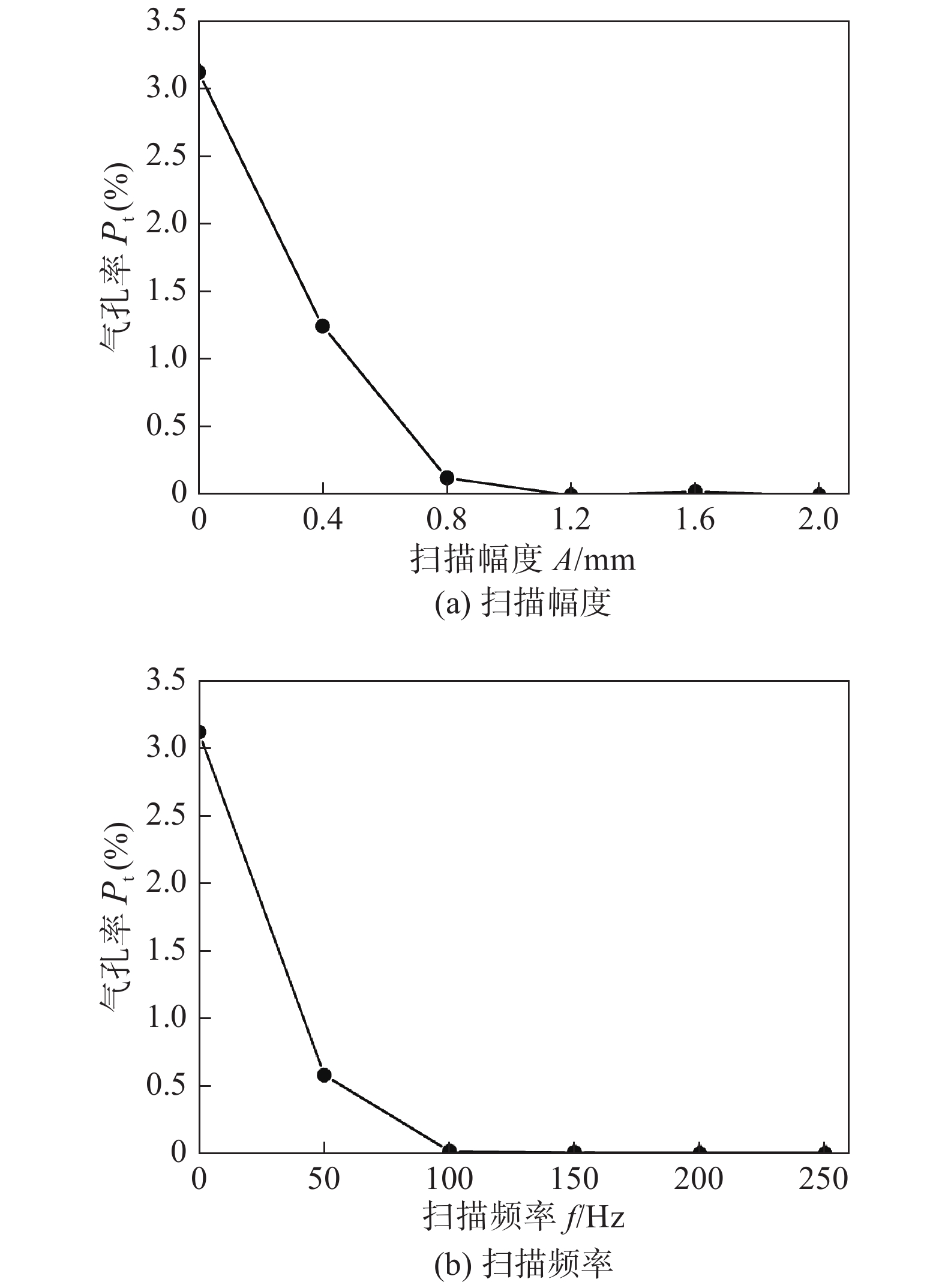
图 6 焊缝气孔率与焊接参数关系
Figure 6. Relationship between the weld porosity and welding perameters. (a) scanning amplitudes; (b) scanning frequencies
![]()
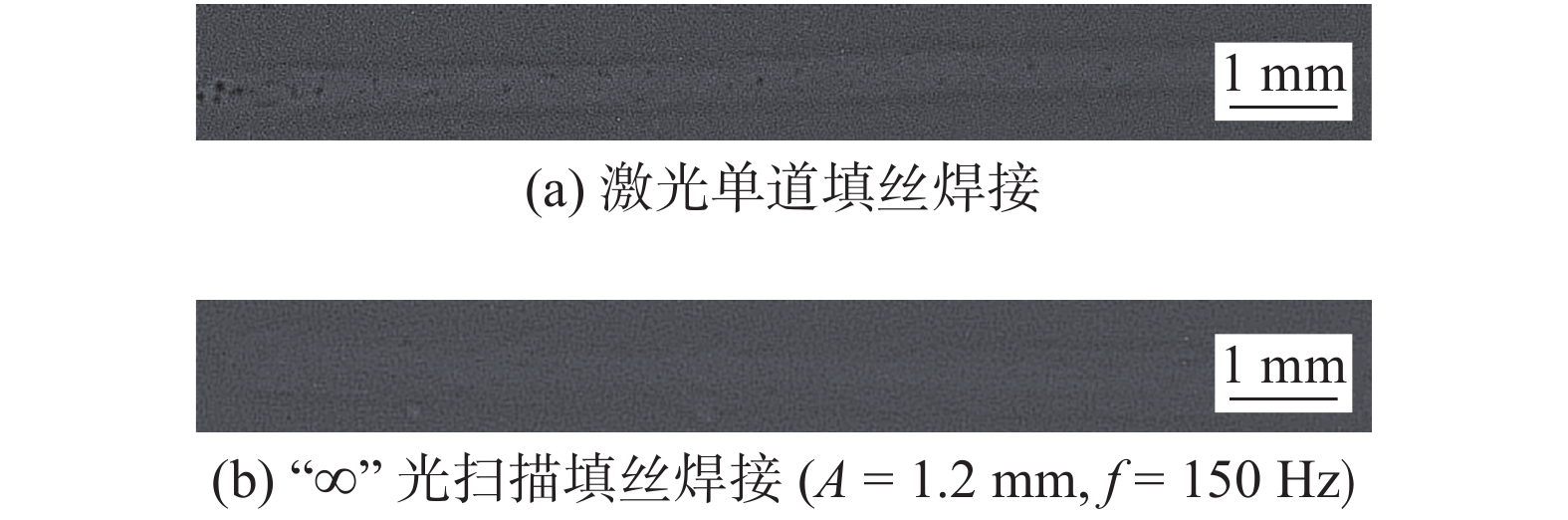
图 7 不同焊接工艺下焊缝气孔分布
Figure 7. Pore distribution of weld seam of different laser welding process. (a) single pass laser welding with filler wire; (b) “∞” shaped laser scanning welding with filler wire(A = 1.2 mm, f = 150 Hz)
![]()
图 8 正常焊接速度下熔池及小孔行为
Figure 8. Behavior of weld pool and keyhole at normal welding speed
表 1 2060铝锂合金和ER4047焊丝的化学成分(质量分数, %)
Table 1 Chemical compositions of 2060 aluminum lithium alloy and ER4047 wire
材料 Li Mg Zn Mn Ag Zr Si Fe Cu Al 2060 0.75 0.85 0.42 0.30 0.30 0.11 0.05 0.1 — 余量 ER4047 — 0.1 0.30 0.11 — — 12 0.08 0.30 余量  下载: 导出CSV
下载: 导出CSV
表 2 单因素试验工艺参数
Table 2 Single factor experiment process parameters
激光功率P/W 离焦量Δf/mm 焊接速度v/(m·min−1) 送丝速度vf/(m·min−1) 扫描幅度A/mm 扫描频率f/Hz 3 400 −1 3.2 3.2 0,0.4,0.8,1.2,1.6,2.0 0,50,100,150,200,250
下载: 导出CSV
表 3 曲面响应试验参数
Table 3 Response surface test parameters
因素 激光功率P/W 焊接/送丝速度v/(m·min−1) 扫描幅度A/mm 扫描频率
f/HzA B C D 低水平 3 100 3 0.8 50 高水平 3 900 5 1.6 150
下载: 导出CSV
表 4 曲面响应变量分析
Table 4 Variable analysis of response surface
方差来源 平方和S 2 自由度df 均方E 回归值F P值 显著性 模型 79 969.66 14 5 712.12 6.53 0.000 6 显著 激光功率A 3 961.42 1 3 961.42 4.53 0.051 6 焊接速度/送丝速度B 1 571.17 1 1 571.17 1.80 0.201 6 扫描幅度C 1 149.93 1 1 149.93 1.31 0.270 9 扫描频率D 37 382.65 1 37 382.65 42.72 < 0.000 1 显著 AB 9.18 1 9.18 0.010 0.919 9 AC 2 039.43 1 2 039.43 2.33 0.149 1 AD 479.39 1 479.39 0.55 0.471 4 BC 90.44 1 90.44 0.10 0.752 6 BD 4 142.85 1 4 142.85 4.73 0.047 2 显著 CD 7 185.11 1 7 185.11 8.21 0.012 5 显著 A2 9 531.95 1 9 531.95 10.89 0.005 3 显著 B2 4 875.72 1 4 875.72 5.57 0.033 3 显著 C2 1 660.37 1 1 660.37 1.90 0.190 0 D2 14 900.79 1 14 900.79 17.03 0.001 0 显著
下载: 导出CSV
-
[1] 陈国庆, 尹乾兴, 司晓庆, 等. 铝锂合金焊接技术的研究现状分析[J]. 焊接学报, 2019, 40(8): 155 − 160. Chen Guoqing, Yin Qianxing, Si Xiaoqing, et al. Research status analysis of aluminum-lithium alloy welding[J]. Transactions of the China Welding Institution, 2019, 40(8): 155 − 160.
[2] 周利, 李高辉, 刘朝磊, 等. 铝锂合金焊接技术的研究现状[J]. 焊接, 2017(1): 7 − 12, 68. doi: 10.3969/j.issn.1001-1382.2017.01.003 Zhou Li, Li Gaohui, Liu Zhaolei, et al. Research progress in welding technology of Al-Li alloy[J]. Welding & Joining, 2017(1): 7 − 12, 68. doi: 10.3969/j.issn.1001-1382.2017.01.003
[3] Dittrich D. Laser beam welding of hard to weld Al alloys for a reginal aircraft fuselage design-first results[J]. Physics Procedia, 2011, 12(1): 113 − 122.
[4] 林凯莉, 杨武雄, 吕俊霞, 等. 2198-T851铝锂合金激光焊接工艺研究[J]. 中国激光, 2014, 41(1): 90 − 95. Lin Kaili, Yang Wuxiong, Lu Junxia, et al. Laser beam welding study of 2198-T851 aluminum-lithium alloy[J]. Chinese Journal of Lasers, 2014, 41(1): 90 − 95.
[5] Lukin V I, Skupov A A, Ioda E N. Investigation of the weldability of an aluminium–lithium alloy[J]. Welding International, 2018, 32(3): 214 − 218. doi: 10.1080/09507116.2017.1388047
[6] 安娜, 张心怡, 杨武雄, 等. 2060铝锂合金电流辅助激光填丝焊接工艺分析[J]. 焊接学报, 2017, 38(3): 83 − 86. An Na, Zhang Xinyi, Yang Wuxiong, et al. Electrical current assisted laser welding of 2060 aluminum lithium alloy with filler wire[J]. Transactions of the China Welding Institution, 2017, 38(3): 83 − 86.
[7] 刘震磊, 崔祜涛, 姬书得, 等. 工艺参数影响2060铝锂合金搅拌摩擦焊接头的成形规律[J]. 焊接学报, 2016, 37(7): 79 − 82. Liu Zhenlei, Cui Hutao, Ji Shude, et al. Effect of process parameters on the forming law of friction stir welded joint of 2060 Al-Li alloy[J]. Transactions of The China Welding Institution, 2016, 37(7): 79 − 82.
[8] Salari E, Jahazi M, Khodabandeh A, et al. Friction stir lap welding of 5456 aluminum alloy with different sheet thickness: process optimization and microstructure evolution[J]. International Journal of Advanced Manufacturing Technology, 2016, 82(1-4): 39 − 48. doi: 10.1007/s00170-015-7342-5
[9] Katayama S, Nagayama H, Mizutani M, et al. Fiber laser welding of aluminium alloy[J]. Welding International, 2009, 23(10): 744 − 752. doi: 10.1080/09507110902836911
[10] Kacar I, Ozturk F, Yilbas B S. A review of and current state-of-the-art in laser beam welding in the automotive industry[J]. Laser in Engineering, 2016, 33(4−6): 327 − 338.
[11] Katayama S, Kawahito Y. Elucidation of phenomena in high power fiber laser welding, and development of prevention procedures of welding defects[J]. Proceedings of Spie the International Society for Optical Engineering, 2009, 7195: 7195R1 − 9.
[12] Huang L, Hua X, Wu D, et al. Numerical study of keyhole instability and porosity formation mechanism in laser welding of aluminum alloy and steel[J]. Materials Processing Technology, 2018, 252: 421 − 431. doi: 10.1016/j.jmatprotec.2017.10.011
[13] Lin R, Wang H P, Lu F, et al. Numerical study of keyhole dynamics and keyhole-induced porosity formation in remote laser welding of Al alloys[J]. Heat and Mass Transfer, 2017, 108: 244 − 256. doi: 10.1016/j.ijheatmasstransfer.2016.12.019
[14] Zhang L J, Zhang J X, Gumenyuk A, et al. Numerical simulation of full penetration laser welding of thick steel plate with high power high brightness laser[J]. Materials Processing Technology, 2014, 214(8): 1710 − 1720. doi: 10.1016/j.jmatprotec.2014.03.016
[15] Matsunawa A, Mizutani M, Katayama S. Porosity formation mechanism and its prevention in laser welding[J]. Welding International, 2003, 17(6): 431 − 437. doi: 10.1533/wint.2003.3138
-
期刊类型引用(7)
1. 高东,李永利,邓颖,周好斌. 旁路耦合电弧TIG焊原理及工艺研究. 热加工工艺. 2025(01): 65-69 .  百度学术
百度学术
2. 孟美情,韩俭,朱瀚钊,梁哲滔,蔡养川,张欣,田银宝. 基于多丝电弧增材制造研究现状. 材料工程. 2025(05): 46-62 . 百度学术
3. 王梦真,万占东,林健. 电弧增材制造工艺及数值仿真研究进展. 大型铸锻件. 2024(01): 7-12 . 百度学术
4. 李博洋,巴现礼,陈帅帅,徐国敏,刘黎明. 不同路径下的低碳钢三丝间接电弧增材制造组织与性能. 焊接技术. 2024(10): 1-6+145 . 百度学术
5. 张加恒,黄祎,郭顺,杨东青,闫德俊,李东,王克鸿. 超音频MIG辅助三丝电弧增材制造工艺研究. 电焊机. 2023(02): 104-110 . 百度学术
6. 吴涛,谭振,王立伟,梁志敏,汪殿龙. 异质双丝间接电弧增材制造Al-Mg-Cu合金组织与力学性能. 焊接学报. 2023(10): 64-70+136 . 本站查看
7. 朱强,姚屏,许斯帆,许可昱. 316L不锈钢电弧增材制造工艺研究. 精密成形工程. 2023(11): 164-170 . 百度学术
其他类型引用(1)









计量
- 文章访问数: 371
- HTML全文浏览量: 40
- PDF下载量: 26
- 被引次数: 8
